Поддержка инкрементных / квадратурных энкодеров и применение в работе с электроприводом
- Поддерживаются режимы подсчета вверх и вниз
- У таймеров TIM1/8 и TIM2/3/4/5
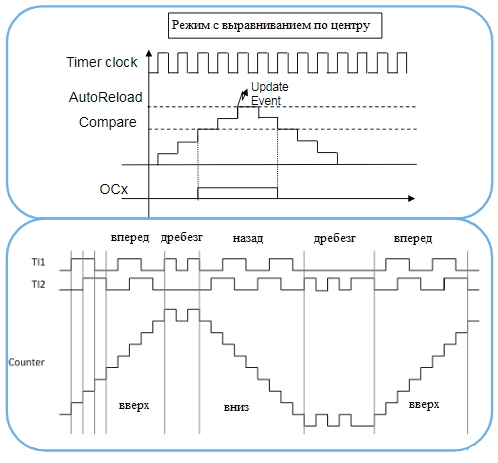
- Генерация ШИМ с выравниванием по центру
- Изменение направления при переполнении и опустошении
- Уменьшает акустический шум в электродвигателях
- Встроенная поддержка квадратурного энкодера
- Поворотный энкодер / цифровой потенциометр
- Датчик положения
- Позволяет прямое считывание угла в таймере
Некоторые из таймеров STM32 имеют режимы счета вверх / вниз: расширенные таймеры управления 1 и 8 и универсальные таймеры 2, 3, 4 и 5.
Направление счета может задаваться программно или автоматически управляться таймером в режиме ШИМ с выравниванием по центру. В этом режиме направление счета изменяется автоматически при переполнении и опустошении счетчика. Для заданной частоты переключения ШИМ, этот режим уменьшает акустический шум, удваивая эффективную частоту пульсаций тока, обеспечивая тем самым оптимальный компромисс между потерями при переключении силовых каскадов и шумом.
Направление счета может также автоматически обрабатываться, когда таймер находится в режиме энкодера. Квадратурные энкодеры обычно используются для высокоточного определения положения ротора в электродвигателях или для цифровых потенциометров. С двух выходов энкодера (также называемого инкрементным датчиком) таймер получает тактовые импульсы на каждом активном фронте и регулирует направление счета в зависимости от относительного фазового сдвига между двумя поступающими сигналами. Таким образом, счетчик таймера непосредственно фиксирует угловое положение двигателя или потенциометра.
Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: