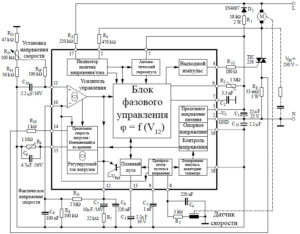
Схема фазового управления с обратной связью
Описание:
Интегральная схема U211B2/B3 разработана как схема фазоконтроля по биполярной технологии с внутренним преобразователем частоты (аналог TDA1085). Кроме того, микросхема оснащена встроенным усилителем сигнала управления и может использоваться для регулирования скорости вращения электродвигателя. Он имеет интегрированное ограничение нагрузки, мониторинг цепи тахометра и функции плавного пуска и многое другое для реализации сложных систем управления двигателем.
Особенности (свойства):
- Внутренний преобразователь частоты в напряжение
- Интегрированный усилитель с внешним управлением
- Ограничение перегрузки с «откидной» характеристикой
- Оптимизированная функция плавного пуска
- Мониторинг тахометра для замкнутого и разомкнутого контура
- Автоматическая перезагрузка
- Стандартное значение импульса срабатывания: 155 мА
- Синхронизация напряжения и тока
- Внутренний мониторинг напряжения питания
- Источник задания температуры
- Потребление тока ≤ 3,3 мА

Информация о серии
| Номер расширенного типа | Тип корпуса | Примечания |
| U211B2-B | DIP18 | |
| U211B3-BFP | SO16 | |
| U211B3-BFPG3 | SO16 |
Описание группы контактов
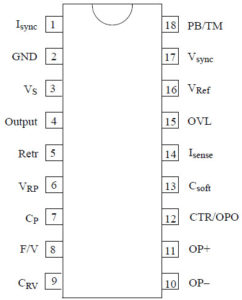
| Контакт | Обозначение | Функция |
| 1 | Isync | Ток синхронизации |
| 2 | GND | Земля |
| 3 | Vs | Напряжение питания |
| 4 | Output | Импульсный выход управления |
| 5 | Retr | Программный перезапуск |
| 6 | VRP | Регулировка тока разгона |
| 7 | Cp | Регулировка напряжения разгона |
| 8 | F/V | Преобразователь частоты в напряжение |
| 9 | CRV | Генератор подкачки заряда |
| 10 | OP- | Инвертирующий вход OP |
| 11 | OP+ | Неинвертирующий вход OP |
| 12 | CTR/OPO | Управляющий вход / выход OP |
| 13 | Csoft | Плавный пуск |
| 14 | Isense | Измерение тока нагрузки |
| 15 | OVL | Регулировка перегрузки |
| 16 | VRef | Опорное напряжение |
| 17 | Vsync | Синхронизация напряжения |
| 18 | PB/TM | Блокирование импульсов / Мониторинг тахометра |
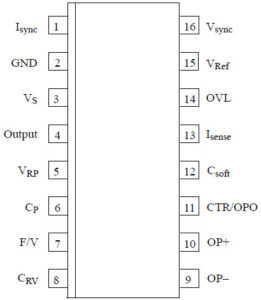
| Контакт | Обозначение | Функция |
| 1 | Isync | Ток синхронизации |
| 2 | GND | Земля |
| 3 | Vs | Напряжение питания |
| 4 | Output | Импульсный выход управления |
| 5 | VRP | Регулировка тока разгона |
| 6 | Cp | Регулировка напряжения разгона |
| 7 | F/V | Преобразователь частоты в напряжение |
| 8 | CRV | Генератор подкачки заряда |
| 9 | OP- | Инвертирующий вход OP |
| 10 | OP+ | Неинвертирующий вход OP |
| 11 | CTR/OPO | Управляющий вход / выход OP |
| 12 | Csoft | Плавный пуск |
| 13 | Isense | Измерение тока нагрузки |
| 14 | OVL | Регулировка перегрузки |
| 15 | VRef | Опорное напряжение |
| 16 | Vsync | Синхронизация напряжения |
Описание
Сетевое питание
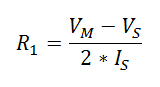
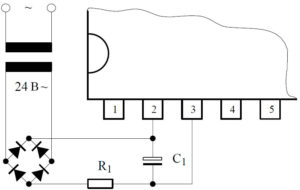
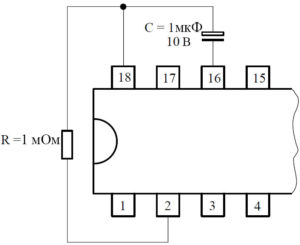
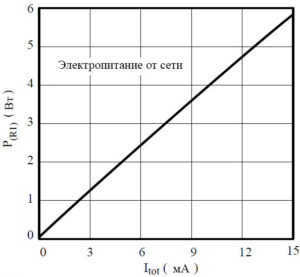
Микросхема U211B2/B3 оснащена ограничителем (стабилизатором) напряжения и поэтому может питаться непосредственно от сети. Напряжение питания между контактом 2 (+ pol / ) и контактом 3 формируется через D1 и R1 и сглаживается C1. Значение последовательного сопротивления можно аппроксимировать с помощью формулы (см. рис. 2):
Источник опорного напряжения на выводе 16 с номинальным напряжением -8,9 В формируется от напряжения питания и используется для регулирования.
Не рекомендуется использовать внешний стабилизированный источник постоянного напряжения.
Если питание не может быть взято непосредственно из сети, поскольку (потому как) мощность рассеиваемая резистором R1 будет слишком большой, то следует использовать схему, показанную на рисунке 5.
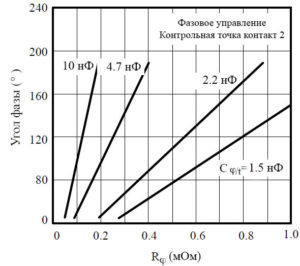
Фазовое управление
Существует общее объяснение в книге «Биполярные схемы управления питанием» для общей функции управления фазой. Фазовый угол запускающего импульса определяется путем сравнения линейно изменяющегося напряжения (которое является сетевым синхронизированным с помощью детектора напряжения) с заданным значением на входном выводе управления 12. Крутизна нарастания напряжения определяются емкостью C2 и его зарядным током. Зарядный ток можно изменять с помощью R2 на контакте 6. Максимальный фазовый угол αmax также можно регулировать с помощью R2.
Когда потенциал на контакте 7 достигает номинального значения, определенного на контакте 12, генерируется импульс, ширина tp которого определяется значением C2 (значение C2 а следовательно и ширина импульса может быть определена из того, что 8 мкс приходится на 1 нФ). ***В то же время, защелка устанавливается, так что до тех пор, пока автоматическое повторное переключение не было активировано, никакие больше импульсов не могут быть созданы в этой половине цикла.
Датчик тока на выводе 1 гарантирует, что при работе с индуктивными нагрузками импульс не будет генерироваться в новом полупериоде, пока ток от предыдущего полупериода все еще течет в противоположном направлении по отношению к напряжению питания в этот момент. Это гарантирует, что «провалы» в токе нагрузки будут отсутствовать.
Управляющий сигнал на контакте 12 может находиться в диапазоне от 0 В до -7 В (контрольная точка контакт 2).
Если V12 = -7 В, фазовый угол максимален = αmax то есть, угол потока тока является минимальным. Фазовый угол αmin минимален, когда V12 = V2.
Контроль напряжения
По мере формирования напряжения неконтролируемые выходные импульсы исключаются при помощи внутреннего контроля напряжения. В то же время все защелки в цепи (фазовое управление, регулирование предельной нагрузки, плавный пуск) сбрасываются, а конденсатор плавного пуска замыкается. Используемая с гистерезисом переключения 300 мВ, эта система гарантирует определенное пусковое поведение при каждом включении напряжения питания или после перебоев питания в сети.
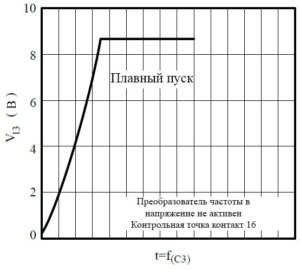
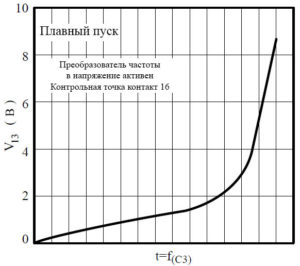
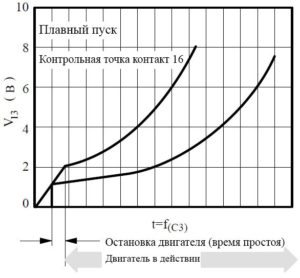
Плавный пуск
Как только напряжение питания возрастает (t1), инициируется интегрированный плавный пуск. На графике 6 представлено поведение напряжения на конденсаторе с мягким пуском и оно идентично напряжению на входном фазо-управляющем контакте 12. Такое поведение обеспечивает мягкий (легкий) запуск двигателя и автоматически обеспечивает оптимальное время запуска.
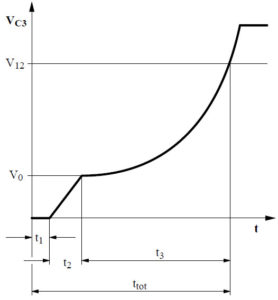
t1 – Формирование напряжения питания
t2 – Зарядка С3 до пускового напряжения
t1 + t2 – Время задержки
t3 – Время разгона
ttot – Общее время запуска до требуемой скорости
C3 сначала заряжается до пускового напряжения V0 током ta, обычно 45 мкА (t2). Затем зарядный ток уменьшается до 4 мкА, существенно уменьшается наклон режима заряда конденсатора, так что скорость вращения двигателя увеличивается постепенно. Далее ток зарядки увеличивается по мере увеличения напряжения на C3, в результате чего постепенно повышается режим зарядки, что дает большее ускорение двигателю, тем самым увеличивая скорость вращения. Режим заряда определяет ускорение до заданного значения. Максимальное значение зарядного тока может составлять 55 мкА.
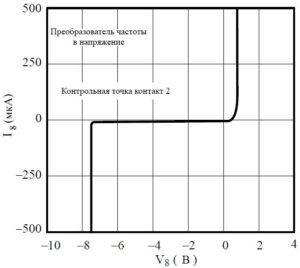
Преобразователь частоты в напряжение
Внутренний преобразователь частоты в напряжения (f/V converter) генерирует сигнал постоянного тока на выводе 10 пропорциональный скорости вращения, используя сигнал переменного тока от тахогенератора или оптического датчика, частота которого в свою очередь зависит от скорости вращения. Уровень сигнала на высокоомном контакте 8 сравнивает напряжение от тахогенератора с порогом включения -100 мВ. Порог отключения при этом равен -50 мВ. Гистерезис обеспечивает стабильную работу преобразователя даже с относительно простыми тахогенераторами. Частота тахогенератора определяется формулой:
Где:
n – число оборотов в минуту
p – количество импульсов на 1 оборот
Преобразователь работает по принципу накачки заряда. При каждой отрицательной полуволне входного сигнала количество заряда, определенное емкостью C5, внутренне усиливается, а затем интегрируется емкостью C6 и формируется на выходе 10 преобразователя. Константа преобразования k определяется емкостью C5, уровнем заряда Vch, резистором R6 (контакт 10) и внутренне скорректированным коэффициентом усиления заряда Gi.
Аналоговое выходное напряжение определяется формулой:
![]()
Номиналы C5 и C6 подбираются так, чтобы при максимальной входной частоте максимальный уровень выходного напряжения Vо не превышал 6 В. В процессе заряда C5, резистор Ri на выводе 9 приблизительно равен 6,7 кОм. Для достижения хорошей линейности преобразователя частоты в напряжение постоянная времени, определяемая из Ri и C5, должна быть значительно меньше (1/5) временного интервала отрицательного полупериода при максимальной частоте входного сигнала. Величина остаточных пульсаций уровня выходного сигнала на контакте 10 зависит от емкостей C5, C6 и внутреннего усиления заряда.
Снижения пульсаций ∆Vo можно достичь увеличением номинала C6. Однако при этом также снизится разгон.
Номинал этого конденсатора выбирается исходя из конкретных задач.
Блокировка импульсов
Выход импульсов можно заблокировать с помощью вывода 18 (режим ожидания) и сброса системы через монитор напряжения, если V18 ≥ –1.25 В. После циклического прохода через ключевую точку гистерезиса выход освобождается, когда V18 ≤ –1.5 В с последующим плавным запуском, например, после включения.
Контроль вращения осуществляется при помощи подключения RC-цепи к контакту 18. В случае короткого замыкания или обрыва цепи, импульсы запуска симистора прерываются временной задержкой, которая определяется сопротивлением R и емкостью C. Конденсатор C разряжается через внутреннее сопротивление Ri = 2 кОм с каждым процессом переноса заряда преобразователя частоты в напряжение. Если процессов переноса заряда больше нет, конденсатор С заряжается через R до тех пор, пока порог срабатывания не будет превышен, а запускающие импульсы симистора отключены. Для работы без блокировки пусковых импульсов или контроля вращения, контакты 18 и 16 должны быть соединены вместе (объединены).
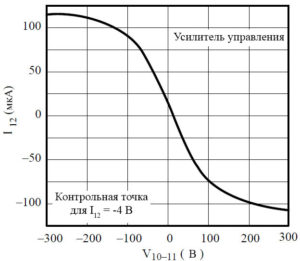
Усилитель управления (см. рис. 2)
Интегрированный усилитель управления с дифференциальным входом сравнивает установленное значение (контакт 11) с мгновенным значением на контакте 10 и генерирует регулирующее напряжение на выходном контакте 12 (совместно с внешней схемой на контакте 12), который всегда поддерживает фактическое напряжение в заданных значениях. Усилитель имеет коэффициент пропускания 1000 мкА/В и биполярный выход источника тока на выводе 12, который работает с типовым значением ± 110 мкА. Усиление и частотная характеристика определяются значениями R7, C7, C8 и R11 (номиналы могут быть опущены). Для работы с разомкнутым контуром (без обратной связи) C4, C5, R6, R7, C7, C8 и R1 могут быть опущены. Контакт 10 должен быть соединен с контактом 12 а контакт 8 с контактом 2. Фазовый угол пускового импульса регулируется (настраивается) с помощью напряжения на контакте 11. Внутренняя ограничивающая цепь защищает напряжение на выводе 12 от установки более отрицательного напряжения, чем V16 + 1 В.
Ограничение нагрузки
Ограничение нагрузки по стандартной схеме включения обеспечивает абсолютную защиту от перегрузки двигателя. Функция ограничения нагрузки учитывает тот факт, что двигатели, работающие на более высоких скоростях, могут безопасно выдерживать большие рассеиваемые мощности, чем на более низких скоростях из-за повышенного действия охлаждающего вентилятора. Аналогичным образом были учтены краткосрочные перегрузки для двигателя, которые часто встречаются в практике. Такие перегрузки не приведут к какому-либо ущербу.
В каждом положительном полупериоде схема измеряет через R10 ток нагрузки на контакте 14 как падение напряжения на R8 и создает ток, пропорциональный напряжению на контакте 14. Этот ток доступен на выводе 15 и интегрирован с помощью C9. Если, в случае воздействия сильных амплитудных токов или большого фазового угла для тока, напряжение на конденсаторе C9 превышает внутренний установленный порог приблизительно 7,3 В (опорное напряжение на контакте 16), устанавливается защелка и включается ограничение нагрузки. Контролируемый источник (приемник) тока управляемый напряжением на контакте 15, теперь потребляет ток от вывода 12 и снижает управляющее напряжение на контакте 12 так, чтобы фазовый угол α увеличился до αmax.
Одновременное уменьшение фазового угла, во время протекания тока, влияет во-первых, на уменьшение скорости вращения двигателя, которое может даже упасть до нуля, если угловой момент двигателя слишком велик, а во-вторых, на уменьшение напряжения на С9, что, в свою очередь, уменьшает влияние нагрузки по току на выводе 12. Затем управляющее напряжение может снова увеличиться и снизить фазовый угол. Этот цикл действия устанавливает «сбалансированное условие» между «интегралом тока» на контакте 15 и управляющим напряжением на контакте 12.
Помимо амплитуды тока нагрузки и времени, в течение которого протекает ток, напряжение на контакте 12 и, следовательно, скорость вращения также влияет на функцию ограничения нагрузки. Ток, пропорциональный напряжению на контакте 10, приводит к падению напряжения на R10 через контакт 14, так что ток, измеренный на контакте 14, меньше фактического тока через R8.
Это означает, что более высокие скорости вращения и более высокие амплитуды тока приводят к одному и тому же интегралу тока. Поэтому на более высоких скоростях рассеиваемая мощность должна быть больше, чем при более низких скоростях, прежде чем будет превышено внутреннее пороговое напряжение на выводе 15. Влияние скорости на максимальную мощность определяется резистором R10 и поэтому может быть отрегулировано в соответствии с задачей.
Если после того, как ограничение нагрузки было включено, импульс нагрузки опускается ниже «o-импульса», установленного с использованием R10, тогда напряжение V15 будет уменьшено. Затем V12 может снова увеличиваться, так что фазовый угол уменьшается. Меньший фазовый угол соответствует большему импульсу двигателя, и, следовательно, двигатель разгоняется — пока это допускается импульсом нагрузки. Для уже вращающегося механизма влияние вращения на измеренный «интеграл тока» гарантирует, что рассеиваемая мощность может увеличиваться с частотой вращения. Результатом является управляемый током разгон, который заканчивается небольшим пиком ускорения при достижении заданного значения. Одновременно сбрасывается фиксатор ограничения нагрузки. Затем скорость двигателя снова контролируется и способна выдерживать полную нагрузку. Вышеупомянутый пик ускорения зависит от пульсации фактического значения напряжения. Большое количество пульсаций приводит к большому пику ускорения.
Номинал измерительного резистора R8 подбирается таким, чтобы амплитуда напряжения на нем не превышала 600 мВ.
Советы по проектированию
Практические испытания обычно необходимы для точного определения значений соответствующих компонентов при ограничении нагрузки. Чтобы определить эти значения было проще, в следующей таблице представлено влияние компонентов схемы на важные параметры ограничения нагрузки и их суммарное влияние.
| Параметры | Компонент | ||
| R10 Увеличение | R9 Увеличение | C9 Увеличение | |
| Pmax | увеличивается | уменьшается | нет эффекта |
| Pmin | увеличивается | уменьшается | нет эффекта |
| Pmax / min | увеличивается | нет эффекта | нет эффекта |
| td | нет эффекта | уменьшается | увеличивается |
| tr | нет эффекта | увеличивается | увеличивается |
Pmax – Максимальная непрерывная рассеиваемая мощность P1 = f(n) n ≠ 0
Pmin – Рассеиваемая мощность при остановленном двигателе P1 = f(n) n = 0
td – Время задержки
tr – Время восстановления
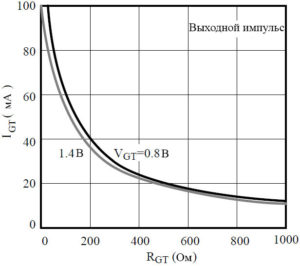
Импульсный выходной каскад
Импульсный выходной каскад защищен от короткого замыкания и может выдавать токи до 125 мА. Для расчета (получения) меньших пусковых токов приведена функция IGT = f (RGT) в технической документации на рисунке 18.
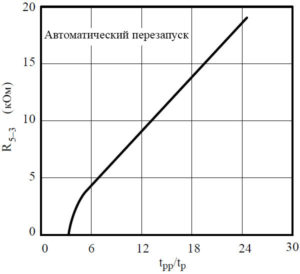
Автоматический перезапуск
Изменяемая автоматическая перезагрузка предотвращает полупериоды без тока, даже если симистор выключен раньше, например, из-за недостаточного центрирования коллектора (щетки) или в случае неудачного запуска. При необходимости новый пусковой импульс генерируется после временной задержки, которая определяется частотой повторения, установленной сопротивлением между контактом 5 и контактом 3 (R5-3). При максимальной частоте повторения (контакт 5 напрямую подключенный к контакту 3), следующая попытка запуска появляется после паузы в 4,5 tp, и это повторяется до тех пор, пока не «загорится» симистор или не завершится полупериод. Если контакт 5 подключен, то генерируется только один пусковой импульс на полупериод. Поскольку значение R5-3 определяет зарядный ток C2, любая частота повторения, за счет установленного сопротивления R5-3, действительна только при фиксированном значении C2.
Общие советы и пояснения терминов
Для обеспечения безопасной и бесперебойной работы при построении цепей или конструкции печатных плат следует учитывать следующие моменты:
- Соединительные дорожки от C2 до контактов 7 и 2 должны быть как можно короче. Соединение с контактом 2 не должно быть нагружено дополнительным высоким током, таким как ток нагрузки. Конденсатора С2 желательно использовать с низкотемпературным коэффициентом.
- Общие соединения (соединения с землей) генератора заданного значения, тахогенератора и конечного помехоподавляющего конденсатора C4 преобразователя частоты в напряжение не должны находиться под током нагрузки.
- Тахогенератор должен быть установлен так, чтобы на него не воздействовали электромагнитные поля от двигателя.
- Соединения с R10 и C5 должны быть как можно короче.
Для достижения высокой помехоустойчивости следует использовать максимальное линейно-изменяющееся напряжение 6 В.
Номинальное сопротивление Rφ рассчитывается для Iφ следующим образом:
T – длительность периода для частоты сети (10 мс при 50 Гц)
Cφ – конденсатор разгона, макс. напряжение разгона 6 В и постоянное падение напряжения при Rφ = 1,13 В.
Рекомендуется применять значение Rφ на 10% меньше (в наихудших условиях).

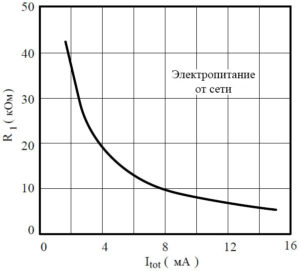
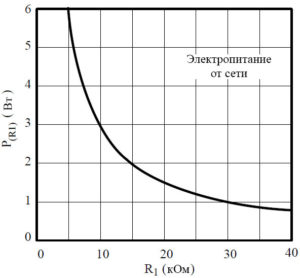
Проектные расчёты для сетевого питания
Следующие уравнения могут быть использованы для определения последовательного резистора R1 для наихудших условий:
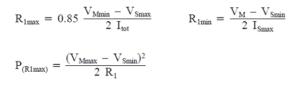
VM – Сетевое напряжение
VS – Напряжение питания на контакте 3
Itot – Общий требуемый постоянный ток для схемы
Itot = IS + Ip + Ix
ISmax – Требуемый ток для питания микросхемы, мА
Ip – Среднее значение потребляемого тока для запускающего импульса
Ix – Ток потребляемый другими периферийными компонентами
R1 можно легко определить из рисунков 22-24.
| Параметры | Обознаение | Значение | Ед. изм |
|
Потребляемый ток Контакт 3 t < 10 мкс |
-Is | 30 | мA |
| -is | 100 | мA | |
|
Синхронизация тока Контакт 1
Контакт 17
t < 10 мкс Контакт 1
t < 10 мкс Контакт 17 |
IsyncI | 5 | мA |
| IsyncV | 5 | мA | |
| ±iI | 35 | мA | |
| ±iI | 35 | мA | |
| Преобразователь частоты Контакт 8 | |||
| Входной ток
t < 10 мкс |
Ii | 3 | мA |
| ±iI | 13 | мA | |
| Ограничение нагрузки Контакт 14 | |||
| Предельный ток, отрицательная полуволна
t < 10 мкс |
Ii | 5 | мA |
| 35 | мA | ||
| Входное напряжение Контакт 14
Контакт 15 |
±Vi | 1 | В |
| -Vi | |V16|…0 | В | |
| Фазовое управление | |||
| Входное напряжение Контакт 12 | -Vi | 0…7 | В |
| Входной ток Контакт 12
Контакт 6 |
±Ii | 500 | A |
| -Ii | 1 | мA | |
| Плавный пуск | |||
| Входное напряжение Контакт 13 | -Vi | |V16|…0 | В |
| Импульсный выход | |||
| Обратное напряжение Контакт 4 | Vr | Vs…5 | В |
| Блокирование импульсов | |||
| Входное напряжения Контакт 18 | -Vi | |V16|…0 | В |
| Усилитель | |||
| Входное напряжения Контакт 11
Контакт 9 открыт Контакт 10 |
Vi | 0…Vs | В |
| -Vi | |V16|…0 | В | |
| Источник опорного напряжения | |||
| Входной ток Контакт 16 | Io | 7.5 | мA |
| Диапазон температур хранения | Tstg | -40…+125 | °C |
| Температура перехода | Tj | 125 | °C |
| Диапазон температур окружающей среды | Tamb | -10…+100 | °C |
| Параметры | Обозначение | Максимальные
значения |
Ед. изм | |
| Кристалл окружающая среда
|
DIP18
SO16 on p.c. SO16 on ceramic |
RthJA | 120
180 100 |
K/W
K/W K/W |
| Параметры | Условия испытаний / Контакты | Обозначение | Мин. | Ном. | Макс | Ед. изм | ||||||||
| Напряжение питания при работе от сети | Контакт 3 | -Vs | 13.0 | VLimit | В | |||||||||
| Ограничение напряжения питания | -Is = 4 мА Контакт 3
-Is = 30 мА |
-Vs | 14.6 | 16.6 | В | |||||||||
| -Vs | 14.7 | 16.8 | В | |||||||||||
| Потребляемый ток (постоянный) | -Vs = 13.0 В Контакт 3 | Is | 1.2 | 2.5 | 3.0 | мА | ||||||||
| Источник опорного напряжения | -IL = 10 мкА Контакт 16
-IL = 5 мА |
-VRef | 8.6 | 8.9 | 9.2 | В | ||||||||
| 8.3 | 9.1 | В | ||||||||||||
| Температурный коэффициент |
Контакт 16 |
–TCVRef | 0.5 | мВ/K | ||||||||||
| Контроль напряжения | ||||||||||||||
| Порог включения |
Контакт 3 |
-VSON | 11.2 | 13.0 | В | |||||||||
| Порог выключения |
Контакт 3 |
-VSOFF | 9.9 | 10.9 | В | |||||||||
| Токи фазового управления | ||||||||||||||
| Синхронизация тока |
Контакт 1 Контакт 17 |
±IsyncI | 0.35 | 2.0 | мА | |||||||||
| ±IsyncV | 0.35 | 2.0 | мА | |||||||||||
| Ограничение напряжения | ±IL = 5 мА
Контакты 1 и 17 |
±VI | 1.4 | 1.6 | 1.8 | В | ||||||||
| Опорное линейное напряжение, см. рис 9 | ||||||||||||||
| Ток заряда | I7 = f (R6);
R6 = 50 к … 1 мОм Контакт 7 |
I7 | 1 | 20 | мкА | |||||||||
| Rφ — опорное напряжение | α > 180 °C
Контакты 6 и 3 |
VφRef | 1.06 | 1.13 | 1.18 | В | ||||||||
| Температурный коэффициент |
Контакт 6 |
TCVφRef | 0.5 | мВ/K | ||||||||||
| Импульсный выход , см. рисунок 20 Контакт 4 | ||||||||||||||
| Выходной импульсный ток | RGT = 0,
VGT = 1.2 В |
Io | 100 | 155 | 190 | мА | ||||||||
| Обратный ток | Ior | 0.01 | 3.0 | мкА | ||||||||||
| Ширина выходного импульса | Cφ = 10 нФ | tp | 80 | мкс | ||||||||||
| Усилитель | ||||||||||||||
| Диапазон синфазных сигналов | Контакты 10 и 11 | V10, 11 | V16 | -1 | В | |||||||||
| Входной ток смещения |
Контакт 11 |
IIO | 0.01 | 1 | мкA | |||||||||
| Входное напряжение смещения | Контакты 10 и 11 | V10 | 10 | мВ | ||||||||||
| Выходной ток |
Контакт 12 |
-IO
+IO |
75
88 |
110
120 |
145
165 |
мкA
мкA |
||||||||
| Коэффициент пропускания при коротком замыкании в прямом направлении | См. Рис. 16
I12 = f(V10 -11) Контакт 12 |
Yf | 1000 | мкA/В | ||||||||||
| Блокировка импульсов, мониторинг тахометра Контакт 18 | ||||||||||||||
| Логическая схема — вкл | –VTON | 3.7 | 1.5 | В | ||||||||||
| Логическая схема — выкл | –VTOFF | 1.25 | 1.0 | В | ||||||||||
| Входной ток | V18 = VTOFF = 1.25 В
V18 = V16 |
II | 14.5 | 0.3 | 1 | мкA | ||||||||
| мкA | ||||||||||||||
| Выходное сопротивление | RO | 1.5 | 6 | 10 | кОм | |||||||||
| Преобразователь частоты-напряжение Контакт 8 | ||||||||||||||
| Входной ток смещения | IIB | 0.6 | 2 | мкA | ||||||||||
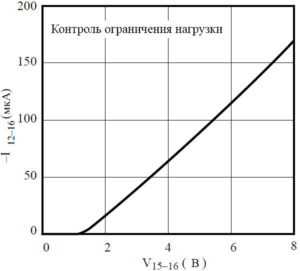
| Ограничение входного напряжения | См. рис. 15
II = -1 мА II = +1 мА |
–VI
+VI |
660
7.25 |
750
8.05 |
мВ
В |
|||||||||
| Порог включения | -VTON | 100 | 150 | мВ | ||||||||||
| Порог выключения | -VTOFF | 20 | 50 | мВ | ||||||||||
| Усилитель зарядки | ||||||||||||||
| Ток разряда | См. рис. 2, C5 = 1 нФ,
Контакт 9 |
Idis | 0.5 | мА | ||||||||||
| Напряжение передачи заряда | Контакты 9…16 | Vch | 6.50 | 6.70 | 6.90 | В | ||||||||
| Коэффициент передачи заряда | I10/I9
Контакты 9 и 10 |
Gi | 7.5 | 8.3 | 9.0 | |||||||||
| Коэффициент преобразования | См. рис. 2
C5 = 1 нФ, R6 = 100 кОм |
K | 5.5 | мВ/Гц | ||||||||||
| Выходной рабочий диапазон | Контакты 10…16 | VO | 0-6 | В | ||||||||||
| Линейность | ±1 | % | ||||||||||||
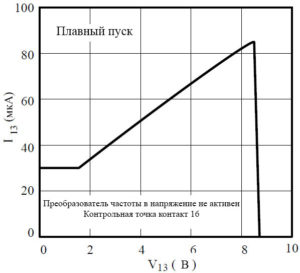
| Плавный пуск, см. Рис. 10, 11, 12, 13, 14
преобразователь частоты-напряжение неактивный |
||||||||||||||
| Пусковой ток | V13 = V16, V8 = V2
Контакт 13 |
IO | 20 | 45 | 55 | мкA | ||||||||
| Конечный ток |
V13 = 0.5 Контакт 13 |
IO | 50 | 85 | 130 | мкA | ||||||||
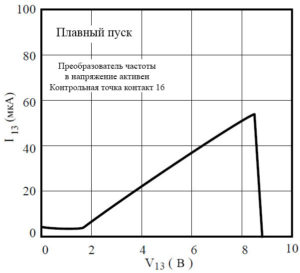
| Преобразователь частоты-напряжение активен | ||||||||||||||
| Пусковой ток |
V13 = V16 Контакт 13 |
IO | 2 | 4 | 7 | мкA | ||||||||
| Конечный ток | V13 = 0.5 | IO | 30 | 55 | 80 | мкA | ||||||||
| Ток разряда | Перезапускающий импульс
Контакт 13 |
IO | 0.5 | 3 | 10 | мА | ||||||||
| Автоматическое повторное включение, см. Рис. 21 Контакт 5 | ||||||||||||||
| Частота повторения | R5-3 = 0 | tpp | 3 | 4.5 | 6 | tp | ||||||||
| R5-3 = 15 кОм | tpp | 20 | tp | |||||||||||
| Ограничение нагрузки, см. Рис. 17, 18, 19 Контакт 14 | ||||||||||||||
| Диапазон рабочего напряжения |
Контакт 14 |
VI | -1.0 | 1.0 | В | |||||||||
| Ток смещения | V10 = V16
Контакт 14 V14 = V2 через 1 кОм Контакт 15-16 |
IO | 5 |
0.1 |
12
1.0 |
мкA | ||||||||
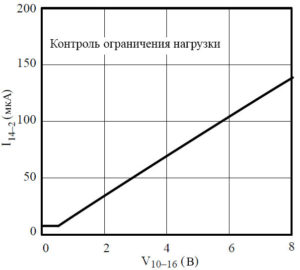
| Входной ток |
V10 = 4.5 В Контакт 14 |
II | 60 | 90 | 120 | мкA | ||||||||
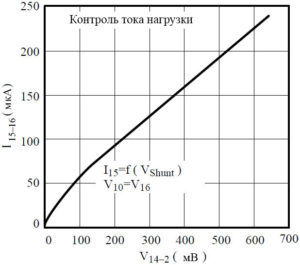
| Выходной ток | V14 = 300 мВ
Контакт 15-16 |
IO | 110 | 140 | мкA | |||||||||
| Перегрузка ВКЛ |
Контакт 15-16 |
VTON | 7.05 | 7.4 | 7.7 | В | ||||||||

Уровень отключения при максимальной нагрузке в принципе показывает ту же зависимость скорости, что и в исходном варианте (см. рисунок 2), но при достижении максимальной нагрузки двигатель полностью выключается. Эта функция выполняется тиристором (образованным T1 и T2), который открывается, когда напряжение на контакте 15 достигает номинального значения. 7.4 В (контрольная точка 16). Таким образом, цепь переключается в «режим ожидания» по освобождению 18 вывода.
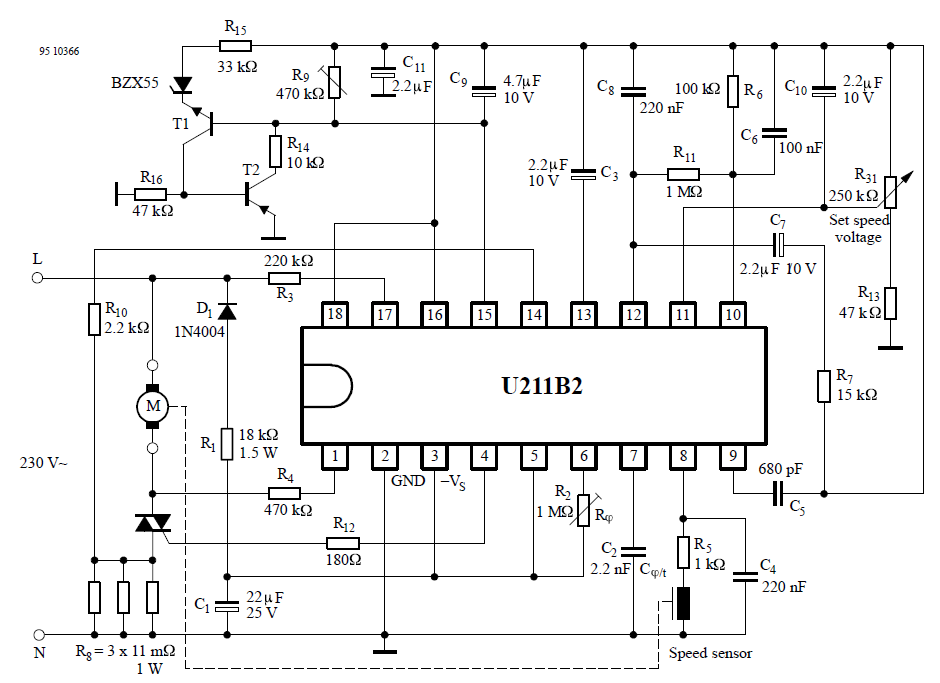
Регулирование максимальной нагрузки дает те же зависимости скорости, что и исходное исполнение (см. рисунок 2). При достижении максимальной нагрузки блок управления поворачивается на αmax, регулируемое с помощью R2. Тогда течет только IO . Эта функция осуществляется с помощью тиристора, образованного T1 и T2, который открывается, как только напряжение на выводе 15 достигает 6,8 В (контрольная точка вывод 16). Потенциал на выводе 15 поднимается и удерживается R14 по внутреннему порогу срабатывания, при котором начинается максимальная регулировка нагрузки и постоянно настраивается блок управления до αmax (IO), что связано с уменьшенным током нагрузки. Двигатель показывает, что схема все еще работает в условиях тихого жужжащего звука.

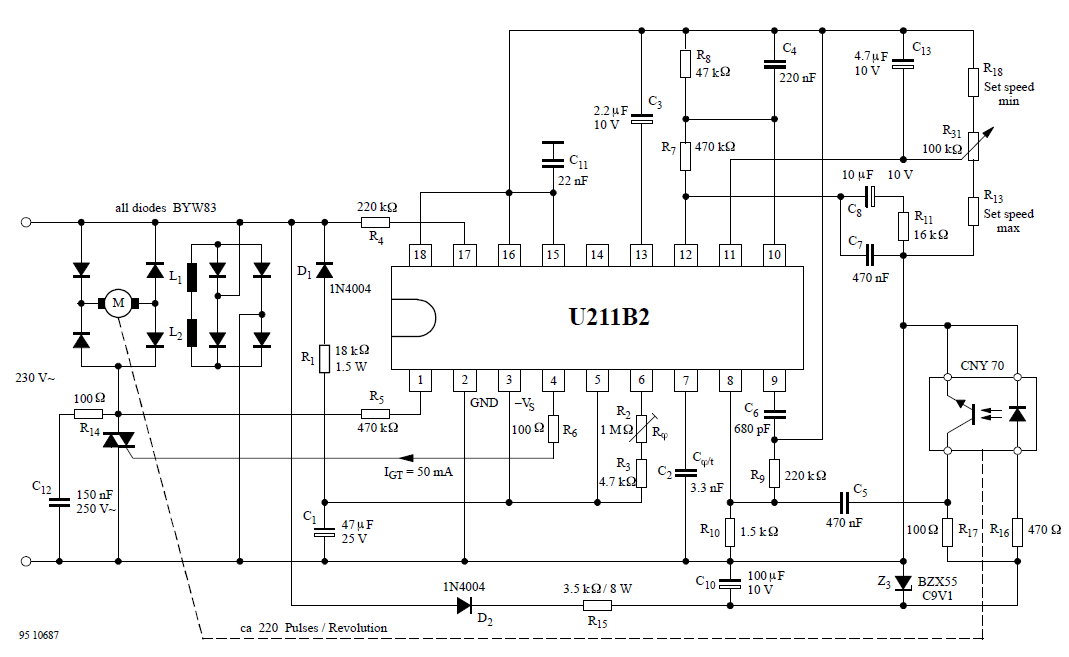
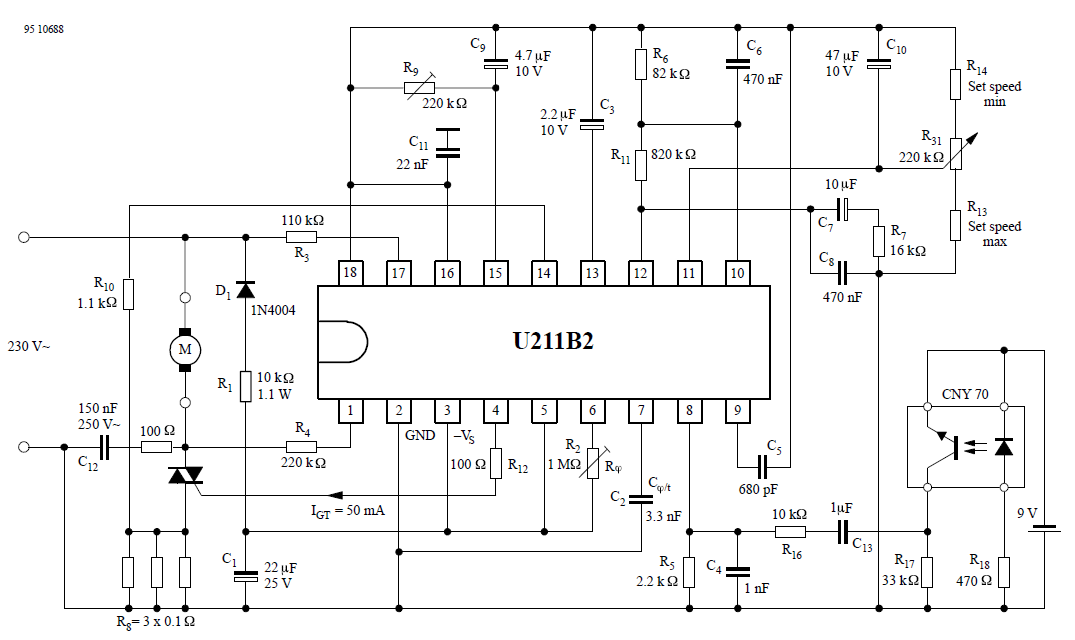
Схема спроектирована для управление скоростью вращения двигателя, основанная на принципе отражения, с 4 периодами за оборот и макс. скорость 30.000 об/мин. Разделение соединителя из вращающегося отверстия должно составлять примерно 1 мм. В этой экспериментальной схеме источник питания для соединителя был обеспечен извне из-за относительно высокого потребления тока.
Инструкции по настройке:
- В начальной регулировке цепи фазового управления R2 следует отрегулировать таким образом, чтобы при R14 = 0 и R31 находилось в мин. положение, мотор как раз поворачивает.
- Затем скорость может быть скорректирована по желанию с помощью R31 между пределами, определенными R13 и R14.
- Мощность ограничивающая нагрузку может задана сопротивлением R9. Чем ниже R9, тем выше мощность отключения.


Хорошо все расписано, понятно. Сайт в закладках! ?Описание добавить в PDFфайл в конце каждой рубрике, чтобы и дома на досуге можно было почитать. Спасибо большое Вам. ?
Спасибо!Мы подумаем над вашим предложением!